Как работает PID-контроллер: интерактивный симулятор от Joshua Bardwell
Если вы когда-нибудь пытались разобраться, что же такое PID-контроллер и как он влияет на поведение вашего FPV-квадрокоптера, то у Джошуа Бардвелла наконец-то есть то, чего не хватало — интерактивный симулятор, который наглядно демонстрирует работу PID с нуля. И да, это не просто теория, а виртуальный объект с понятным интерфейсом, где вы можете двигать «ручку» (set point), а «подписчик» (follower) пытается за ней следовать, используя PID-регулятор.
В основе симулятора — четыре инструмента: пропорциональный (P), интегральный (I), дифференциальный (D) коэффициенты и feed-forward. При нулевых значениях PID ничего не происходит — follower стоит на месте, и ошибка (разница между set point и follower) растёт. Как только вы добавляете P, follower начинает двигаться к цели, причем чем дальше он от set point, тем сильнее «толчок». Но тут же появляется классическая проблема — при слишком большом P возникает колебание вокруг цели из-за инерции и задержек в системе.
Джошуа показывает, что в реальном мире именно задержка между измерением состояния и реакцией моторов — ключевой фактор, который может привести к нестабильности и «разбеганию» квадрика. В симуляторе есть ползунок задержки, и при нулевой задержке колебания быстро затухают, а при увеличении — они растут и могут выйти из-под контроля. Это наглядно объясняет, почему в Betaflight и других прошивках так важно минимизировать задержки и оптимизировать PID.
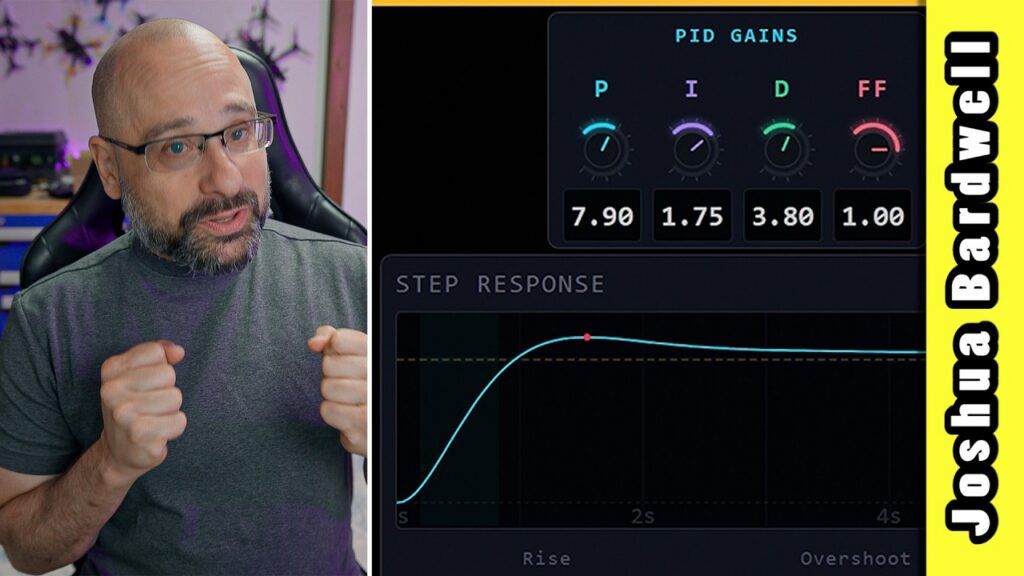
Также в симуляторе есть график step response — классический инструмент для оценки качества настройки PID. Он показывает, как follower реагирует на резкое изменение set point во времени. По нему можно понять, насколько быстро и плавно система достигает цели, есть ли переизбыток колебаний и насколько они затухают. Джошуа сравнивает этот график с тем, что показывает PID Toolbox, но подчеркивает, что его симулятор — полноценная модель с физическими параметрами, а не просто математическая формула.
Особенно полезно, что симулятор позволяет менять массу и сопротивление (drag), чтобы увидеть, как физические свойства влияют на поведение системы. Например, увеличение drag помогает быстрее гасить колебания, что соответствует реальному эффекту трения и сопротивления воздуха.
В целом, этот инструмент — отличный способ понять, что именно делают P, I и D, почему нельзя просто «накрутить» P и забыть, и как задержки и физика влияют на стабильность полёта. Для тех, кто хочет глубже разобраться в настройке PID и научиться читать логи и графики, этот симулятор — полезный и доступный ресурс.
Код симулятора открыт и доступен на сайте Джошуа, так что любой желающий может скачать, покодить и адаптировать под свои нужды. Правда, предупреждение: код написан с помощью AI и не претендует на идеальную архитектуру, но для обучения и экспериментов — самое то.
—
Источник: Joshua Bardwell


